LT86102SXE 1 进 2 出 HDMI 1.4 分配器
LT86102SXE 1 进 2 出 HDMI 1.4 分配器,带 HDCP 引擎、抖动清除和信号重复
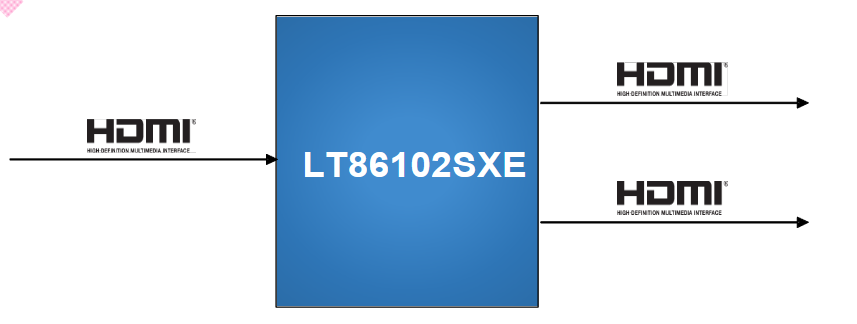
LT86102SXE 1 进 2 出 HDMI 1.4 分配器,带 HDCP 引擎、抖动清除和信号重复
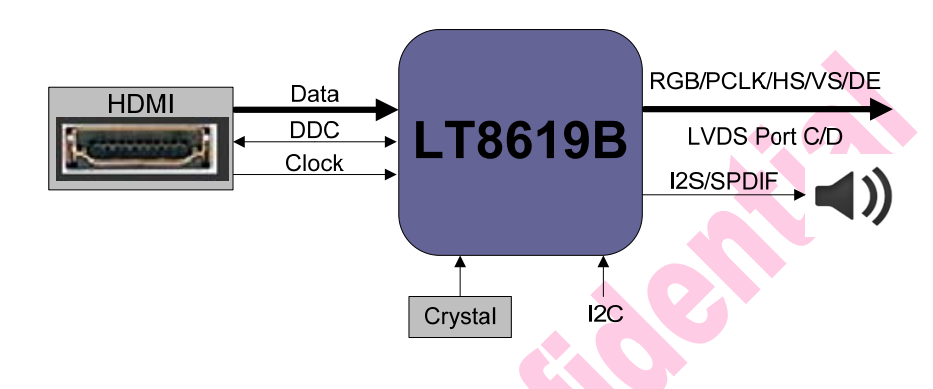
HDMI 1.4 转 RGB BT656 BT1120 / 2 端口 LVDS,带缩放

HDMI2.0 to DP1.2 with Type-C AR/VR
HDMI2.1 to DP1.4a with Type-C AR/VR
1. 描述 LT6911 是一款高性能 HDMI1.4 至 MIPI®DSI/CSI 芯片,适用于 VR/智能手机/显示器应用。对于 MIPI DSI/CSI 输出,LT6911 具有可配置的单端口或双端口或四端口 MIPI®®DSI/CSI,具有 1 个高速时钟通道和 1~4 个高速数据通道,工作速度最大为 1.5Gb/s/通道,可支持高达 24Gbps 的总带宽。 LT6911 支持突发模式 DSI 视频数据传输,还支持灵活的视频数据映射路径。 2. 特点 • HDMI1.4 接收器• 单/双端口/四端口 MIPI® DSI/CSI 发射器• 其他 3.应用 • 移动系统• VR• 显示 LT6911_Product_Brief下载

1. 描述 LT®6911C 是一款高性能 HDMI1.4/DP++ 至 MIPI®DSI/CSI/LVDS 芯片,适用于 VR/智能手机/显示器应用。对于 MIPI DSI/CSI 输出,LT6911C 具有可配置的单端口或双端口 MIPI®®DSI/CSI,具有 1 个高速时钟通道和 1~4 个高速数据通道,工作速度最大为 1.5Gbps/通道,可支持高达 12Gbps 的总带宽。 LT6911C 支持突发模式 DSI 视频数据传输,还支持灵活的视频数据映射路径。对于 LVDS 输出,LT6911C 可配置为单端口或双端口。对于2D视频流,可以将同一视频流映射到两个单独的面板,对于3D视频格式,可以将左侧数据发送到一个面板,右侧数据可以发送到另一个面板。 2. 特点 • HDMI1.4 接收器• 双模分布式端口接收器• 单/双端口 MIPI® DSI/CSI 发射器• 单/双端口LVDS 发射器 3.应用 • 移动系统• VR• 显示 LT6911C_Brief_R1.3下载
